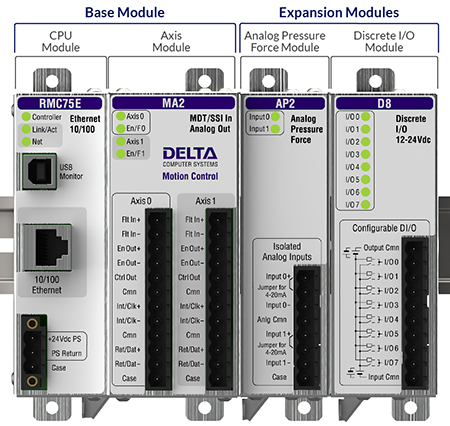
RMC70 Hardware Overview
The RMC70 is a modular controller, consisting of a base module and up to four expansion modules:
- Base module:
Consists of the CPU module and the Axis module and is factory-configured.
Each factory-installed Axis module is available with one or two control axis interfaces.
- Expansion modules:
Up to 4 Expansion modules may be added to the RMC70, including digital I/O, analog reference, and pressure or force inputs.
RMC75 Datasheet
RMC75 Startup Guide
RMC75 I/O Module Details
Try RMCTools Online
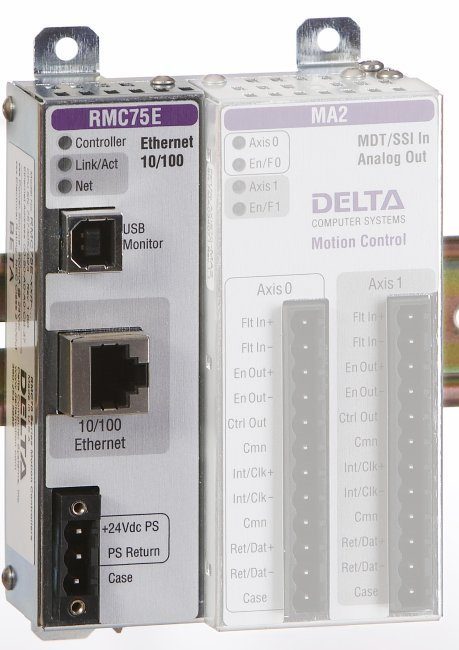
Base, CPU & Power Supply
The CPU portion of the RMC70 Series base module contains the communications and the central processing unit. The initial CPU offering is the RMC75, which includes firmware for one or two axes of motion, support for up to four Expansion modules, and Delta’s easy-to-use Step Editor for user programs.
| CPU Module: |
Monitor Port: |
Communication Type: |
| RMC75E |
USB |
Ethernet (Slave)
EtherNet/IP, PROFINET, Modbus/TCP, CSP, Procedure Exist (Mitsubishi Q-series and FX-Series), FINS (Omron), PROFINET, DMCP (an open simple protocol) |
| RMC75P |
RS-232 |
PROFIBUS-DP (Slave) |
| RMC75S |
RS-232 |
Serial RS-232, RS-485: Allen-Bradley DF1, Modbus/RTU, Bidirectional Protocol (Mitsubishi Q-series) |
Axis Modules: Actuator & Feedback Interface for RMC70 Series
The Axis module portion of the Base module holds the actuator and feedback interfaces of the RMC70 Series motion controller. Each factory-installed Axis module is available with one or two control axis interfaces. Each axis interface includes one discrete input (fault) and one discrete output (enable).
| Axis Module: |
# of Axes: |
Feedback Interface (1 per axis): |
Control Output (1 per axis): |
| AA1 |
1 |
Analog (16 bits), ±10V or 4-20mA |
Analog (± 10V, 16 bit*) |
| AA2 |
2 |
Analog (16 bits), ±10V or 4-20mA |
Analog (± 10V, 16 bit*) |
| MA1 |
1 |
MDT** (Start/Stop or PWM), SSI*** |
Analog (± 10V, 16 bit*) |
| MA2 |
2 |
MDT** (Start/Stop or PWM), SSI*** |
Analog (± 10V, 16 bit*) |
| QA1 |
1 |
Quadrature input (5V differential) |
Analog (± 10V, 16 bit*) |
| QA2 |
2 |
Quadrature input (5V differential) |
Analog (± 10V, 16 bit*) |
*Use Delta’s VC2124 voltage-to-current converter to provide a current output.
**MDT = Magnetostricive Displacement Transducer (linear position sensing)
***SSI = Synchronous Serial Interface (digital interface to various transducer types)
Expansion Modules
| Expansion Module: |
Description: |
| EXP70-D8 |
Discrete I/O
Eight discrete I/O individually configurable for any combination of inputs or outputs. Inputs and outputs are 12-24 VDC rated, polarity independent, and optically isolated from controller. |
| EXP70-AP2 |
Analog Inputs with Pressure Control and Pressure Limit
Two differential ±10 V or 4-20 mA analog inputs for use in position–pressure or position–force control axes. Inputs are 16 bit resolution, and are optically isolated from the controller. |
| EXP70-A2 |
Analog Inputs
Two differential ±10 V or 4-20 mA analog reference inputs. Inputs are 16 bit resolution, and are optically isolated from the controller. |
| EXP70-Q1 |
Quadrature input
Adds one 5 V differential quadrature input for position reference feedback, and a high-speed input for homing or registration. Maximum two Q1s per RMC70. |

RMC75E: Ethernet Communications
The RMC75E provides the processing power of the RMC75 series motion controllers with Ethernet communications and a USB Monitor port.
Supported Protocols
- Modbus/TCP
- CSP (a.k.a. DF1 over Ethernet)
- EtherNet/IP (I/O and Explicit Messaging)
- Procedure Exists (Mitsubishi Q-Series and FX Series)
- FINS (Omron)
- PROFINET
Features
- Auto-negotiation for 10/100Mb/s and half/full-duplex
- Auto Cross-over
- Supports DHCP and BOOTP dynamic configuration protocols as well as manual configuration through the RMCTools software package
Register Data Types
The RMC75 uses floating-point (REAL) data type registers. A handful of these registers are actually used as double integers (DINT) or double word (DWORD) data types.
RMC75 Datasheet

RMC75P: PROFIBUS Communications
The RMC75P provides the processing power of the RMC75 series motion controllers with PROFIBUS-DP communications and an RS-232 Monitor port. PROFIBUS is a vendor-independent, open fieldbus standard for a wide range of applications in manufacturing and factory automation. This high-speed fieldbus was designed especially for communicating between programmable controllers and distributed I/O such as the RMC70 Series motion controller.
Up to 126 nodes can be connected to a single network spanning up to 14km. The RMC75P module supports data rates up to 12Mbaud, permitting high-speed on-the-fly downloads of positions, parameters, and commands to the RMC70 and high-speed uploads of motion profile and status information to the host controller.
The RMC75P PROFIBUS-DP interface gives the flexibility of several operating modes. Select the mode that best fits your application and PROFIBUS-DP master’s capabilities.
Register Data Types
The RMC75 uses floating-point (REAL) data type registers. A handful of these registers are actually used as double integers (DINT) or double word (DWORD) data types.
RMC75 Datasheet

RMC75S: Serial Communications
The RMC75S provides the processing power of the RMC75 series motion controllers with Serial communications and an RS-232 Monitor port.
The RMC75S combines multiple communication protocols with RS-232 and RS-485 transceiver options to form a versatile and industrial-hardened communication platform. The RS-232 option provides full-duplex point-to-point communications, while RS-485 allows half-duplex multi-drop networking with up to 128 RMC70s.
Due to limited throughput of serial communications, the RMC75S is best suited for applications where time-critical machine control functions related to motion are implemented in the RMC75S using the RMC70 User Programs. The serial communications works well for low-bandwidth monitoring or modifications to the RMC75S parameters or User Program variables. In applications where higher throughput is necessary, consider one of Delta's other RMC70 CPU/Communications choices.
Features
- 9600-115200 baud data transfer
- Supports 7 or 8 data bits
- Supports odd, even, or no parity
- Optically-isolated signals
- Software-select RS-232 or RS-485 transceivers
- DB-9 and 8-pin terminal block connectors included
- Allows direct access to all RMC75 registers
- Axis status registers
- Axis command registers
- Axis parameters
- Discrete I/O
- Variables
Supported Protocols
- Allen-Bradley DF1
This protocol is supported by most Allen-Bradley PLCs and HMIs including the PLC-5, SLC 5/05, and ControlLogix. Allen- Bradley ControlLogix, SLC5/05, PLC-5, and SoftLogix 5. The RMC75 supports Full-Duplex and Half-Duplex DF1. The RMC75 uses files F7 to F255.
- Bidirectional Protocol
This protocol is supported by the Mitsubishi Q-Series.
- Modbus/RTU
This protocol is supported by most Modicon PLCs and a number of third party products. The RMC75 uses holding registers 400001 to 465536.
Register Data Types
The RMC75 uses floating-point (REAL) data type registers. A handful of these registers are actually used as double integers (DINT) or double word (DWORD) data types.
RMC75 Datasheet
RMC75 Startup Guide
RMC75 I/O Module Details
Try RMCTools Online


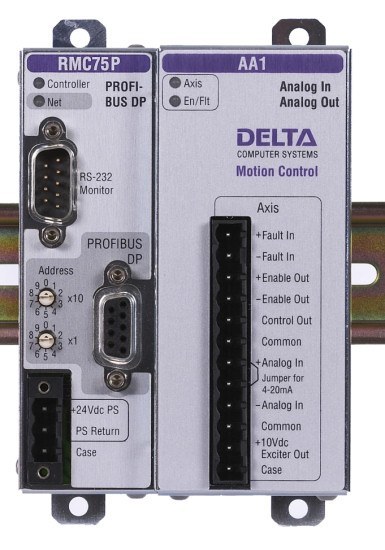
AA1 & AA2
Analog Inputs (± 10V, 4-20mA), Analog Control Output (± 10V)
The AA1 and AA2 Axis modules generate ± 10V analog control outputs and interface to position or pressure feedback transducers with the following characteristics:
- Voltage: ±10V
- Current: 4-20mA
The AA1 and the AA2 modules control one and two axes respectively. Each axis may be independently configured for interface to a voltage-output or current-output transducer. Each axis has a 16- bit, ±10V analog Control Output, an isolated 12-24VDC discrete Fault Input, and an isolated 12-24V SSR* Enable Output.
AAx modules can be used for position, pressure or force control. To use the AAx modules for position–pressure or position–force control, the AP2 Expansion module is also required.
Supported Control Types
- Position Control
- Pressure Control
- Force Control (single-input force)
- Force Control (dual-input, differential force)
- Velocity ReferencevIn conjunction with the AP2 Expansion module:
- Position-pressure control
- Position-force control (single-input force)
- Position-force control (dual-input, differential force)
Current Control Output
If you need current Control Output instead of voltage Control Output (e.g. to drive a servo coil), use the VC2100 series voltage-to-current converters.
RMC75 Datasheet
Voltage-to-Current Converters
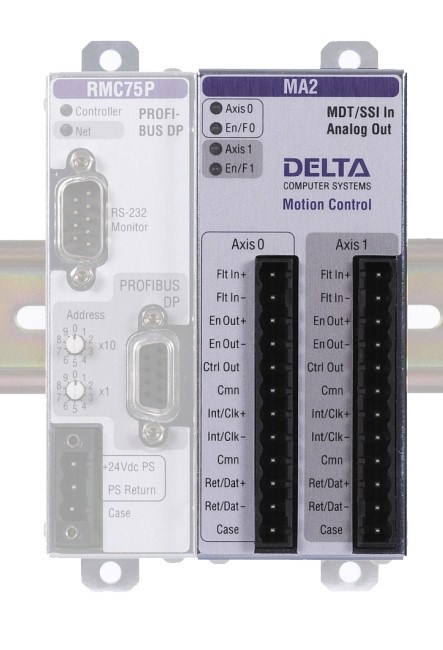
MA1 & MA2

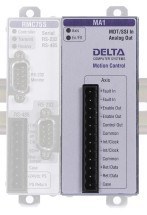
MDT or SSI Inputs, Analog Control Output (± 10V)
The MA1 and MA2 Axis modules generate ± 10V analog control outputs and interface to
position feedback transducers with the following characteristics:
- Magnetostrictive Displacement Transducer (MDT):
RS-422 Pulse Width Modulated (PWM) or Start/Stop, with programmable edge response
- Synchronous Serial Interface (SSI):
MDT or single- or multi-turn absolute encoders with the SSI interface. MDT transducers with SSI output must be of the synchronized type. Make sure to specify synchronized SSI when ordering from your supplier.
The MA1 and MA2 Axis modules control one and two axes respectively. Each axis has a 16- bit, ±10V analog Control Output, an isolated 12-24VDC discrete Fault Input, and an isolated 12-24V SSR* Enable Output. Each axis may be independently configured for interface to either an MDT or SSI transducer. MAx modules can be used for position control. To use the MAx modules for position–pressure or position–force control, the AP2 Expansion module is also required.
Supported Control Types
- Position Control
- Rotary Motion (using SSI interface)
- Linear Motion
- In conjunction with the AP2 Expansion module:
- Position-pressure control
- Position-force control (single-input force)
- Position-force control (dual-input, differential force)
Current Control Output
If you need current Control Output instead of voltage Control Output (e.g. to drive a servo valve coil), use the VC2100 series voltage-to-current converters.
*SSR = Solid State Relay
RMC75 Datasheet
Voltage-to-Current Converters
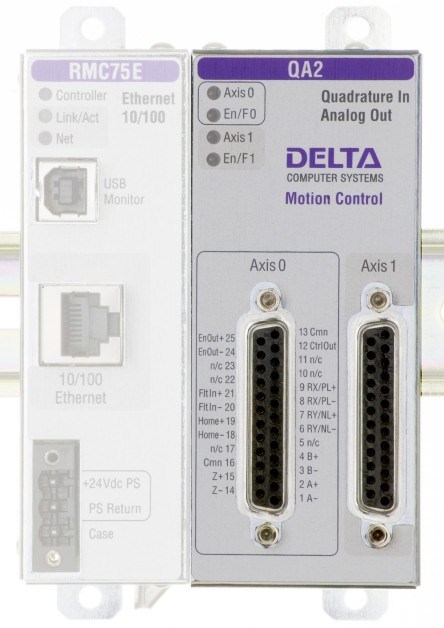
QA1 & QA2


Quadrature Feedback, Analog Control Output (± 10V)
The QA1 and QA2 axis modules, with differential (RS-422) quadrature inputs and analog ±10V control outputs, allow cost-effective control of a wide variety of electric drives as well as electric and hydraulic servo motors.
The QA1 and QA2 axis modules generate analog control outputs and interface to quadrature encoders with 5V differential (RS-422) signals. Additional high-speed inputs allow for homing, registration, or positive and negative limits on a per axis basis. The QA1 and the QA2 modules control one and two axes respectively. QAx modules can be used for position control. Position–pressure or position–force control requires the AP2 Expansion module.
Take advantage of the RMC70’s superior tuning and diagnostics by operating drives and amplifiers in their simplest mode, thereby transferring control to the RMC70. Doing this can lower long term maintenance costs by avoiding obsolescence issues common to many smart drives.
Supported Control Types
- Position Control
- Rotary Motion
- Linear Motion
- In conjunction with the AP2 Expansion module:
- Position-pressure control
- Position-force control (single-input force)
- Position-force control (dual-input, differential force)
RMC75 Datasheet
RMC75 Startup Guide
RMC75 I/O Module Details
Try RMCTools Online
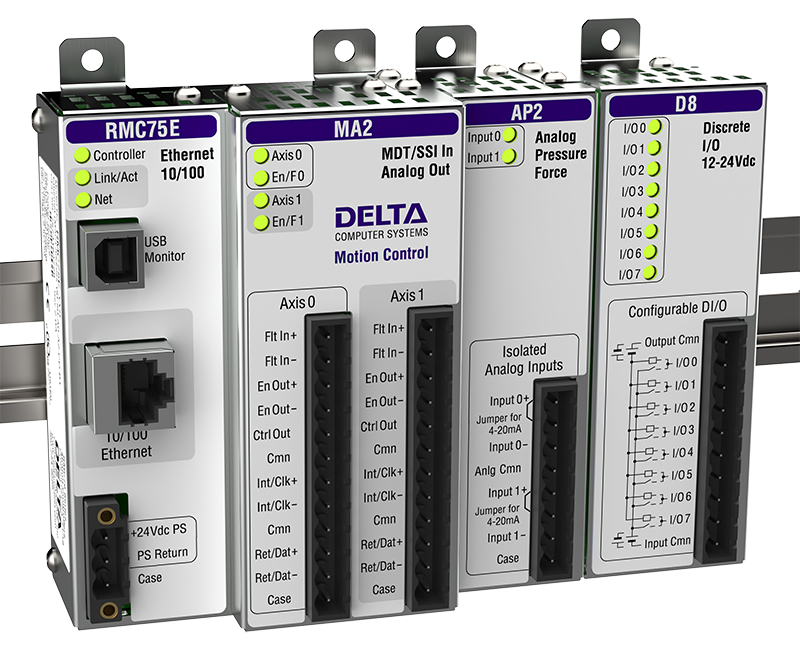
RMC75 Expansion Modules
- D8 - Discrete I/O: Eight Software-Configurable discrete I/O individually configurable for any combination of inputs or outputs. Inputs and outputs are 12-24 VDC rated, polarity independent, and optically isolated from controller.
- AP2 - Analog Inputs for Position-Pressure & Position-Force Control: Two differential ±10 V or 4-20 mA analog inputs for use in position–pressure or position–force control axes. Inputs are 16 bit resolution, and are optically isolated from the controller.
- A2 - Analog Reference Inputs I/O: Two differential ±10 V or 4-20 mA analog reference inputs. Inputs are 16 bit resolution, and are optically isolated from the controller.
- Q1 - Quadrature Input: Adds one 5 V differential quadrature input for position reference feedback, and a high-speed input for homing or registration. Maximum two Q1s per RMC70.
Up to four Expansion modules (Exp70) of any combination can be added to an RMC70 motion controller to bring additional capabilities to the controller.
The Exp70-D8 module adds discrete I/O functionality, the Exp70-A2 adds analog reference inputs, and the Exp70-AP2 adds analog inputs intended for use as pressure or force inputs as part of Delta’s powerful position–pressure or position–force control feature.
RMC70 Series motion controllers consist of a factory-configured Base module with one or two control axes, plus up to four field-installable Expansion modules.
Each Expansion module can be added quickly by simply plugging it into an open expansion connector and securing it with four screws.
No backplane is required—the first Expansion module plugs on to the right side of the Base module, and each subsequent Expansion module plugs into the previous Expansion module.
Each Exp70 module has its own DIN rail locking lever so the entire assembly can be securely mounted. The assembly may also be panel mounted.
RMC75 I/O Module Details
RMC75 Datasheet
RMC75 Startup Guide
Try RMCTools Online





{kind=link}